
汶川地震17年后,少年在交大圆了“报国梦”
MORE
2017年10月27日至29日,由中国人工智能学会主办、中国人工智能学会智能机器人专业委员会协办、哈尔滨工业大学承办的第十二届中国智能机器人大会在哈尔滨举行。来自全国各高等院校、科研院所和相关企业的200多名从事智能机器人学术研究和产业开发的专家学者和青年学生出席了本次会议。有100多篇论文的作者在随后的分组会议上进行了报告和交流,报告内容涉及智能机器人研究、应用和产品开发的最新进展和成果,以及智能机器人发展方向和战略等各个方面。经各分会场推荐和大会优秀论文评审委员会评审,我系杨明教授指导的“一种基于轮廓匹配的仓储机器人托盘检测方法”获评大会优秀论文。
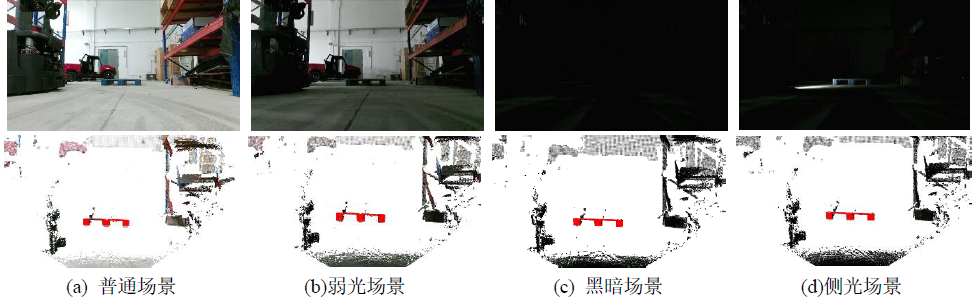
托盘检测是智能仓储中叉车AGV实现全自动搬运的关键环节,针对当前检测方法受环境光照、检测距离、偏转角度等因素影响的问题,杨明教授团队提出一种基于点云平面轮廓匹配的检测方案。该方案采用ToF(Time-of-Flight)相机采集点云并进行平面分割,对分割的点云平面进行栅格化和提取轮廓后与轮廓模板进行匹配,实现对托盘的检测。实验表明,该方案有效解决了光照、距离、偏转角等因素对托盘检测的影响,大幅降低了传感器成本占比,有利于实现产业化应用。
 扫码关注官微
扫码关注官微




