
汶川地震17年后,少年在交大圆了“报国梦”
MORE
夜幕中,一艘无人艇搭载着无人机在水面上行驶,到达指定区域后,无人机起飞进行搜索,完成任务后,无人机通过GPS引导和视觉导航实施自主着艇。成功着艇后,无人艇搭载着无人机顺利返航。
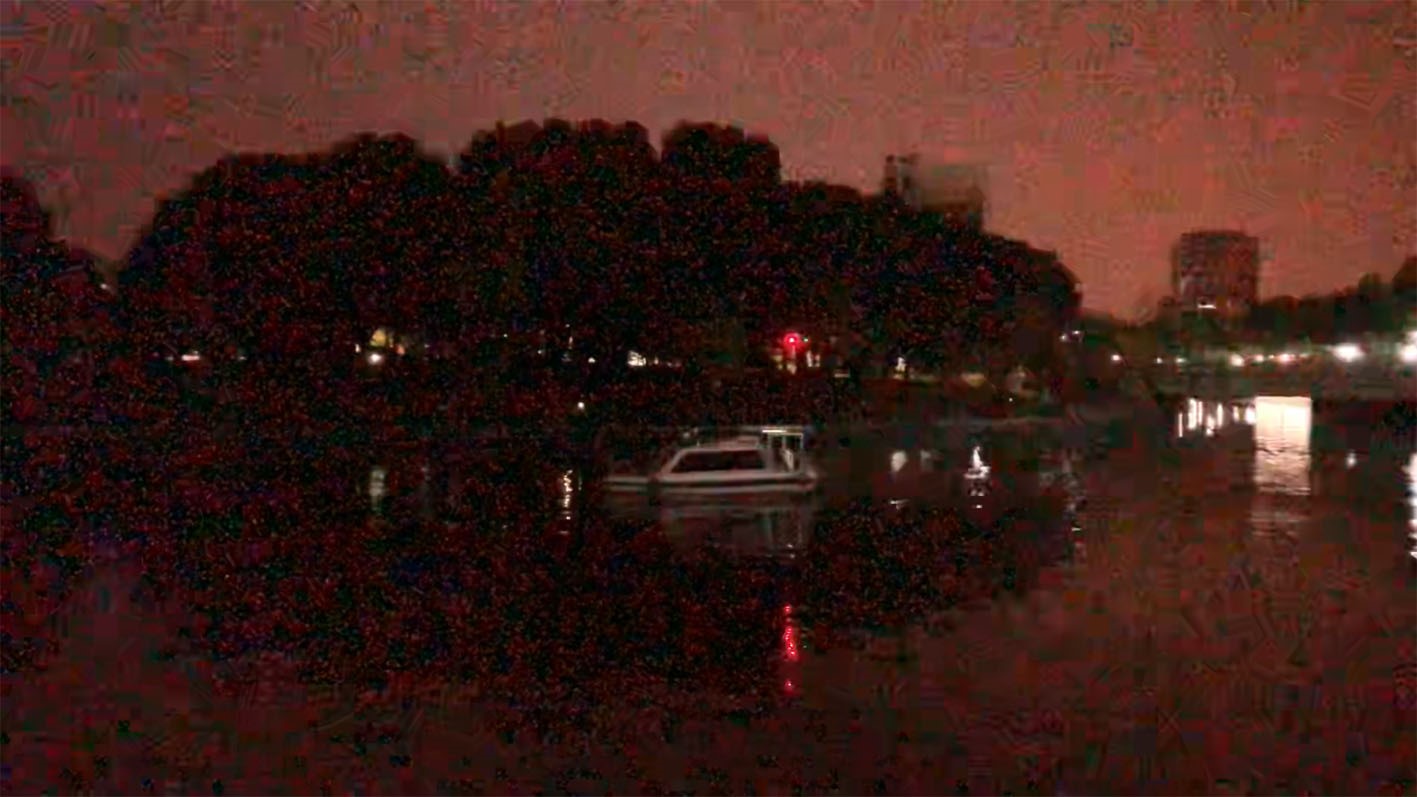
上海交通大学无人机夜间着艇试验
这一幕并不是科幻小说中的片段,而是上海交通大学IPAC团队完成的水空协同无人机夜间自主着艇试验的真实画面。上海交通大学IPAC团队近年来一直在从事空地协同和空海协同方面的研究,经过不断的艰苦努力,攻克了视觉导航、信息融合和协同控制等关键技术难关,2018年在国内最早成功实现了基于视觉的无人机自主水上降落,在优酷上公布了相关录像;最近又在国内首次实现了无人机夜间自主水上降落。相关成果曾在中国自动化大会、全国机器人学术年会、全球人工智能大会、全球人工智能技术大会和北京信息科学与技术国家研究中心“信息领域颠覆性技术发展前沿论坛”进行过介绍,在浙大、西工大、上大、华中科大、哈工程、大连海事、哈工大、南科大、武理工、武科大和安徽理工等多所高校的报告和交流中介绍。
无人机和无人艇组成的机艇协同系统在水上搜救方面具有重要应用前景。我国拥有漫长的海岸线和众多河流。现有的水上搜救方式需要依靠有人船艇,搜救工作一直面临着力量有限、费用高、效率低、保障难和有人员伤亡风险等难题,因此对费用低、效率高和无人员伤亡风险的无人机或无人艇等水上系统有非常迫切的需求。但是这两类系统单独使用时具有很大局限。无人机虽然搜索范围大,但是续航时间较短;无人艇尽管续航时间长,但是搜索范围小。机艇协同系统结合了二者的优点,不仅可广泛用于水上搜救,而且还可用于水上巡逻、水上送货、污染监测、水上测绘、无线中继等许多应用背景。世界海洋强国美国也对该项技术非常重视。美国军火供应商劳斯莱斯就在2018年美国海军水面舰艇协会举行的年度会议上公布过多旋翼无人机和无人舰艇的概念图,计划未来为美国海军提供配备无人机的无人海上舰艇。
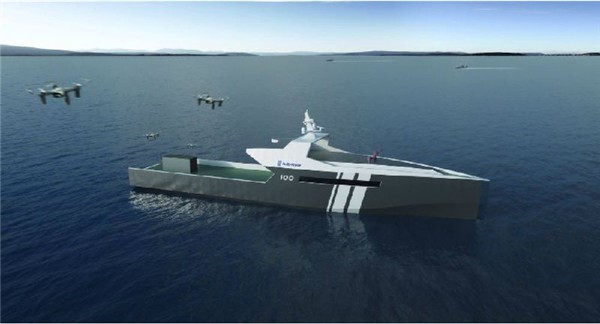
劳斯莱斯多旋翼无人机和无人舰艇的概念图
机艇协同研究是海空跨域无人系统领域的前沿热点,而其中的无人机自主着艇技术更是极具挑战性。此前的研究试验均集中在无人机白天着艇,而夜间着艇则远比白天着艇困难,主要原因在于,在夜间低光照条件下视觉信息清晰度不高,容易被干扰,并且存在“拖影”现象。此次,上海交通大学IPAC团队打破了夜间低能见度的不利环境条件限制,实现了无人机夜间自主水上降落,为未来实现从白天到黑夜24小时不间断的全天候应用打下了坚实基础。
 扫码关注官微
扫码关注官微




